
This is a low cost RC helicopter I bought recently. It is my first experience flying an RC helicopter, or indeed anything at all. It is also marketed as Clever Dragonfly
It has two contra rotating main rotors mounted one above the other and driven coaxially. The rotors are fixed pitch, and lift is varied simply by varying the speed of the drive motors (there is a separate motor for each rotor).
Directional control is achieved by adjusting the relative speeds of the two motors. Increasing the speed of the top rotor relative to the bottom one will make it turn to the right and vice versa.
Since there is no swashplate it is not possible to alter the direction of the main rotors' thrust. This is where the tail rotor comes in. This is not like the 'normal' function of counterbalancing the thrust of the main rotor that conventional helicopter have. Instead it is used as a forward/backwards control. It works simply by applying an upward or downward thrust on the tail of the helicopter, slightly altering its balance. If it pushes upwards it makes the tail lighter, causing the whole machine to tilt slightly forwards. This causes the main rotors' thrust to be slightly inclined backwards and the helicopter advances slowly forward.
There is no way to make the helicopter move sideways as the tail rotor is the only means of modifying the direction of motion, and it can only do that in a forward/backward sense.
However I quickly discovered how deceiving appearances can be and after a few spectacular crashes realised how incredibly tough the machine actually is. At one point the cat jumpoed on it and I was sure that was the end of it (the helicopter that is) as it looke dlike it had been completely flattened. To my surprise when the cat let it go it was just standing there looking good as new and still worked jsut as well as it ever did. It hink the secret is that nearly all of it is made of very flexible and springy material which gives way under presure but then springs back into shape. It is also very light (less than 50 grams) meaning that when it crashes the impact is going to be less.
The third helicopter subsequently showed me that it was not impossible to break it in a crash. I had a very nast crash which broke one of the carbon fibre spars at the hub of the lower rotor. I managed to fix it with heat shrinkable tubing and superglue, though the rotor ended up being somewhat out of balance. I havent managed to fix the balance properly but it is still flyable. The problem is that it sometimes goes into ever increasing oscillations and unless I land quickly it goes totally out of control and crashes.
Shortly after writing this the second helicopter broke down as well. This time the very same motor (lower rotor) failed suddenly in mid flight, sending the chopper into a wild uncontrollable spin and crashing very hard. The shop replaced it with a new one.
I am also now worried that a motor will soon fail again, this time the one of the upper rotor. It is starting to work erratically and slows down after about two minutes of flight. Perhaps it is overheating or something because if I let it rest for sometime it works well again for another few minutes. I am now limiting flights to a max of a minute or two to avoid oveheating (if that is indeed the problem) and hopefully extend the motor's lifetime.
Update 17 Jul 07: Just a few days later the lower rotor motor has failed. The upper rotor motor is also somewhat erratic. I managed to repair the motor, but it will probably last only a few minutes.
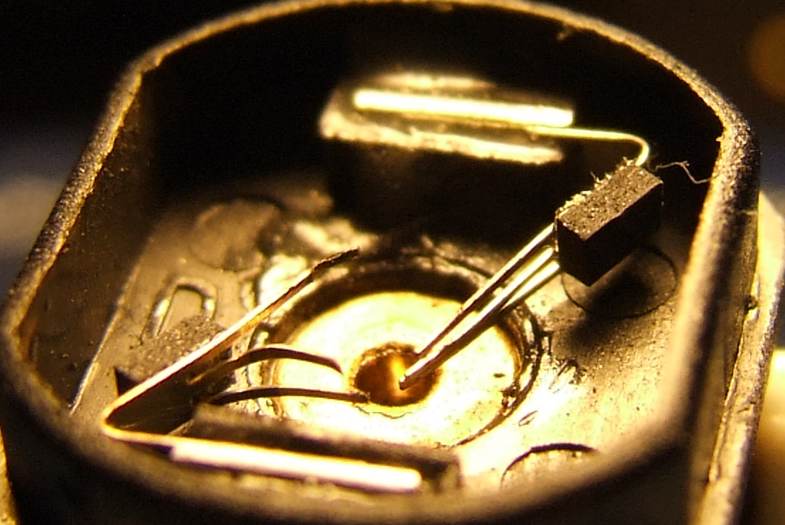
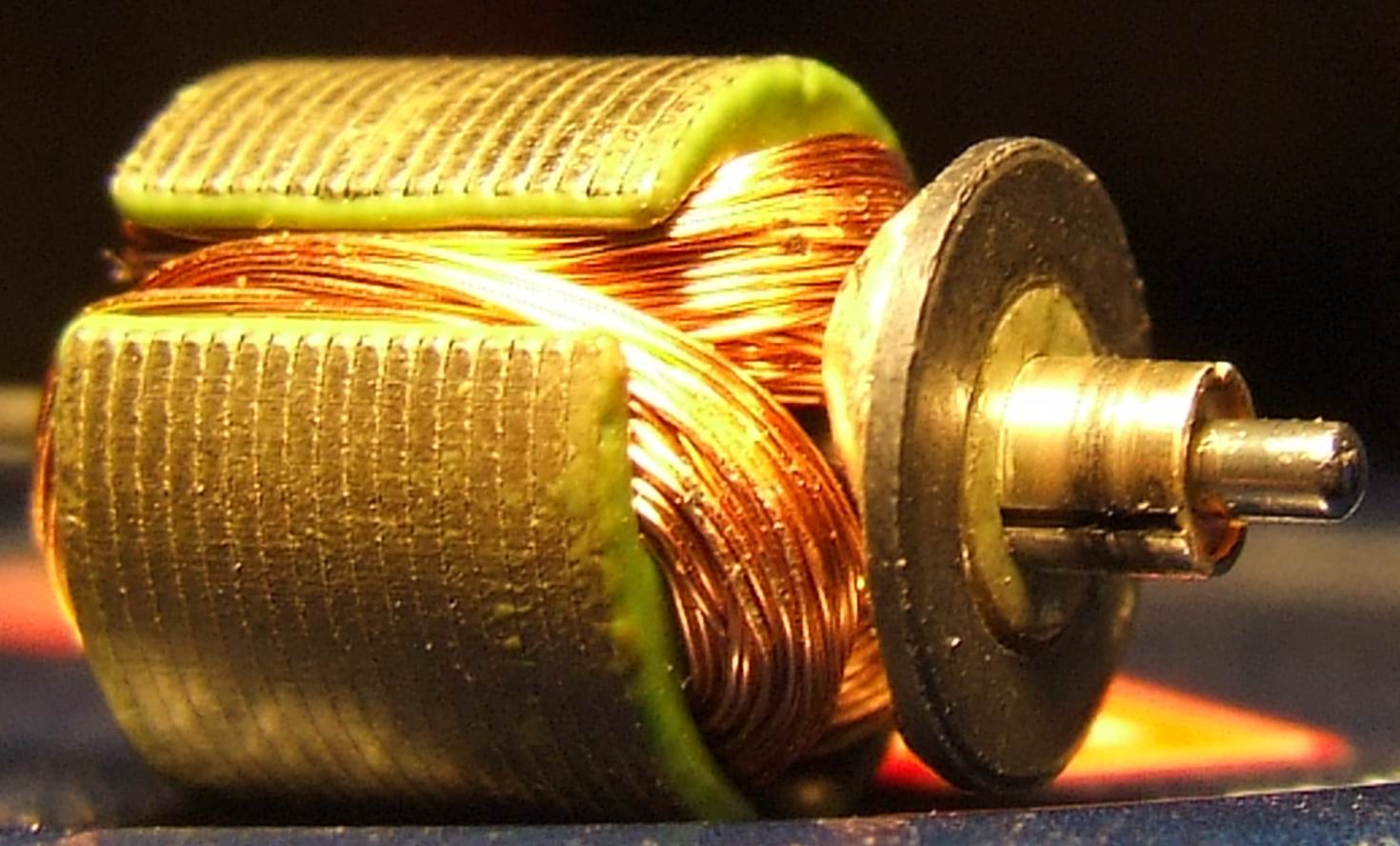
After dismantling the motor the problem is immediately apparent. The brushes are in a very sorry state as can be seen in the pictures below. The commutator is not looking very good either.
Instead of carbon, the brushes are simply a flexible piece of metal slotted so as to have three 'fingers' which maje contact with the commutator. There are two tiny rubber blocks glued to the brushes, presumably to reduce their 'bounce'.
On on of the brushes all three fingers burnt through at the contact point, while on the other one they appear severely worn and somewhat deformed.
Since I have no replacement brushes I jhust straightened them out and 'stretched' them a little, such that there is enough contact surface. I also cleaned them as best I could and tried to bend them back into shape.
After putting the whole thing together I was pleasantly surprised that it worked. I have doubts though how long it will last. And anyway, it seem the other motor is soon about to fail also.
If you buy one of these and find it impossible to fly it, try another one before giving up as the problem could well be with the helicopter rather than your lack of skill. Most shops will have a demo model and will quite pobably let you try it out. You could also take yours back and see if the shop owner manages to fly it.
With the new one, after just a few minutes I could quite easily keep it hovering in a more or less stable manner for any length of time.
Of course, since I do not have any experience with other helicopters and I don;t know how stable or otherwise they are expected to be I cannot compare. However, seeing that I managed to get it under control after just a few minutes of flying and no previous experience it cannot be that bad.
A strange characteristic I noticed is that it seems attracted to vertical surfaces. If you fly close to a wall or other vertical surface it will be pulled towards it no matter what you do. Once it gets within about 50 cm of a wall it is attreacted to it and will be impossible to fly away from it, even if the helicopter is headed away from it and is trying to go forward.
It seems to me that the problem with the backward drift is that it is not properly balanced, being somewhat tail-heavy. To compensate for this I attached a 150mm cable tie under the fuselage to add some weight ahead of the nose. You can see it in the photo, it is the yellow think sticking out in front of the nose. The 'buckle' is towards the front. It is attached to the fuselage just under the gearbox with some wire-wrap.
I adjusted the cable tie to make the chopper just slighlty nose heavy. This gives it a very slight forward drift when the controls are neutral and also gives a lightly better forward speed when advancing. The forward speed remains however slow, though not as bad as it was before the modification.
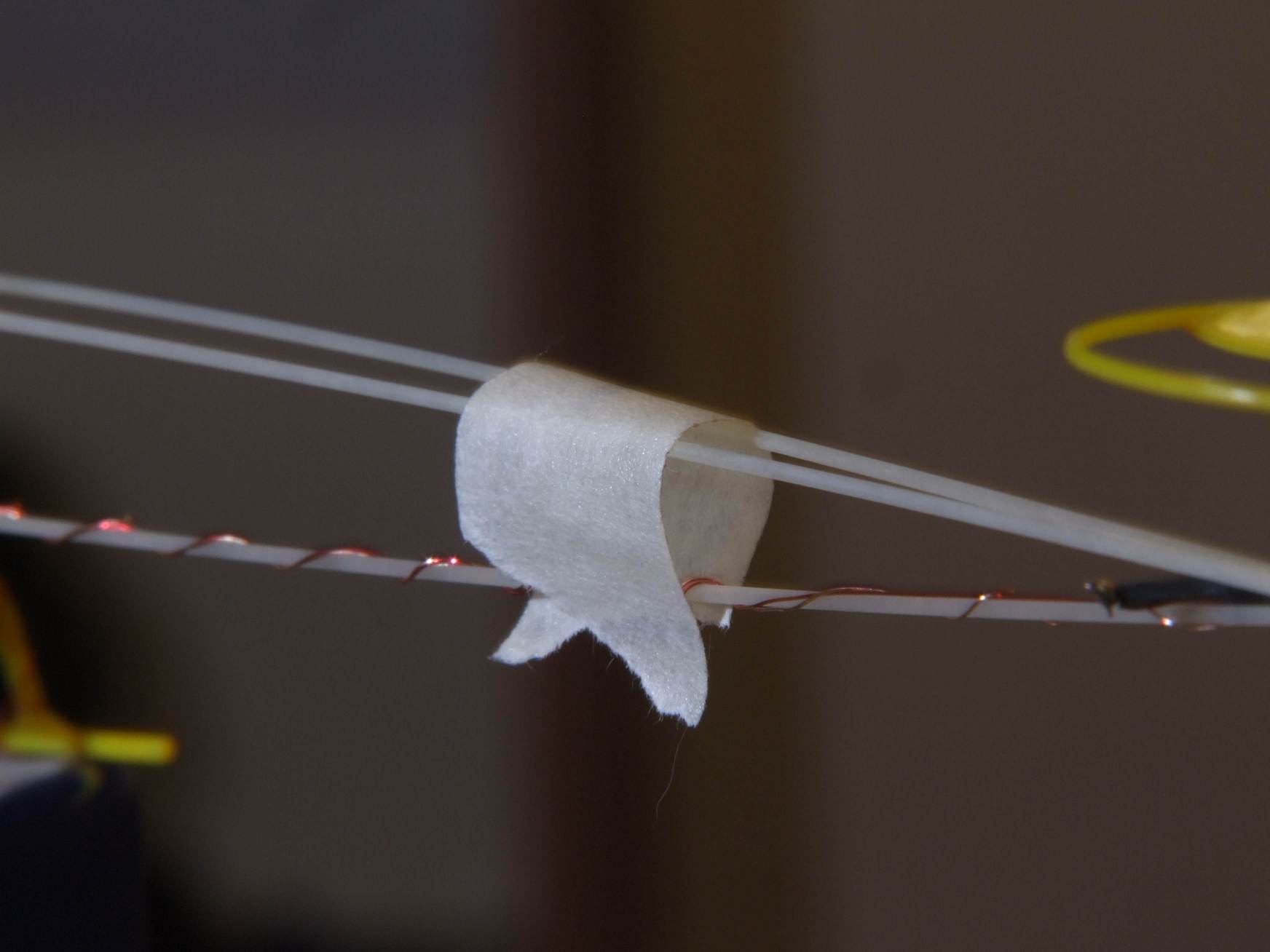
The problem turned out however to be quite easy to solve. All I did was apply some masking tape at the point along the boom where the vibration was most apparent. See the photos below for detail. The tape must be very loosely attached, just enough for it not to come off.
This made a very significant improvement. Apart form the tail rotor working much more smoothly and quietly it has also increased its thrust considerably, which is of course the purpose of the modification. The upward thrust was about 0.45 grams before the modification and increased to about 0.75 after, giving a very noticeable increase in forward speed. The modification probably also increases the lifetime of the motor as that vibration can;t have been doing it much good.
The battery recharges fully in about an hour or so.
The left joystick (the lift control) functions somewhat similarly to the 'collective' on a conventional helicopter, although it achieves this in a different way - it controls the speed of the two rotors rather than the actual collective pitch. The control is not self centering (it stays where you put it) and has a good feel, with the correct amount of friction and no backlash.
The right joystick (direction and forward/reverse) is two axis.
The x axis (left/right) is used to control the direction of the helicopter. It works by varying the proportion of power given to the motors of the upper and lower rotors. I found it very annoying that this control is spring loaded to return to the centre. It would have been much better had it instead been friction loaded like the collective control. The actual centre position rarely coincids with the actual neutral point (where the helicopter turns neither to the left nor the right), so you end up having to push against the spring all the time, which is a distraction and makes it somewhat harder to keep the helicopter stable. The control also seems to have considerable backlash which doesn't help either.
The y axis controls the forward/reverse motion of the helicopter. It directly controls the speed and direction of rotation of the tail rotor. Pushing the stick forward causes the tail rotor to lift the tail and move the helicopter forward, while pulling it backwards achieves the opposite. The control is spring loaded towards the centre neutral position at which point the tail rotor is stationary. I would have liked the spring loading on this control to be softer.




Page created 4th July 2007.
Last updated on 17 July 2007