GPS衛星定位測量概論
地籍測量人員訓練班筆記;講師:成功大學,余致義
全球定位系統(以下簡稱GPS)原是美國國防部為軍事定時、定位與導航目的所發展,
希望以衛星導航為基礎的技術可構成主要的無線電導航系統,未來並能滿足下一個世紀的應用。
在1993年12月8日第24顆GPS衛星進入太空軌道運行後,
GPS已達到初步操作能力(Initial Operational Capability,IOC),
24顆GPS衛星(包含初期測試用的Block I與量產型Block II/IIA)提供全世界24小時全天候定位與導航資訊,
IOC之後GPS衛星分佈圖可參閱下圖。
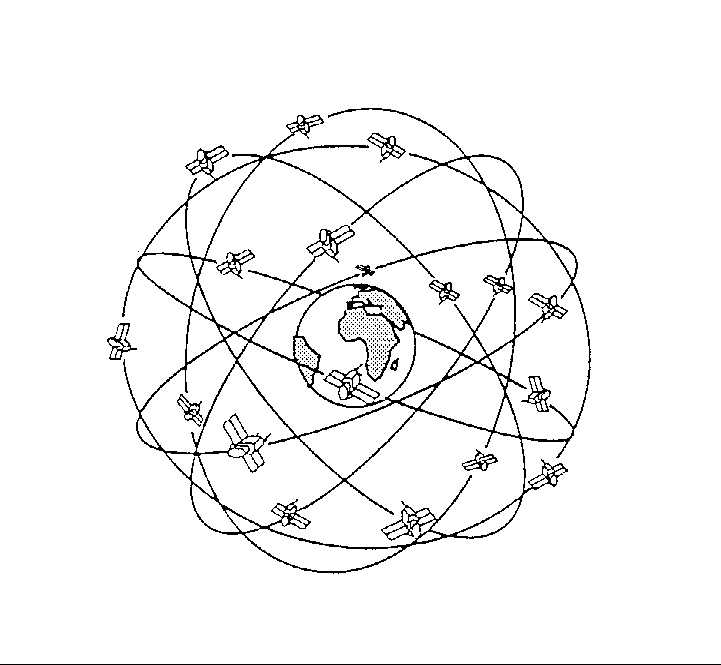
圖1-1 IOC之後GPS分佈圖 [Wolf and Brinker,1994]
美國空軍太空司令部(U.S. Air Force Space Command,AFSC)
於1995年4月27日宣布GPS已達到完整操作能力(Full Operational Capability,FOC),
將IOC中的Block I衛星加以汰換,24顆衛星全部為Block II/IIA衛星所組成,成功地滿足軍事實務的操作。
由於此技術的迅速發展,
使得民間的應用需求與日俱增,對傳統導航方式更有革命性的影響。
為了區別一般(民間用途)與受任可(軍事用途)的定位層級,
GPS依所得的觀測量精度分成標準定位服務(Standard Positioning Service,SPS)與精密定位服務(Precise Positioning Service,PPS),
其間的差異在於導)精度的不同;SPS預期的絕對精度為平面100公尺,高程156公尺(95﹪可信水平),
而PPS預期的絕對精度為平面22公尺,高程22.7公尺(95﹪可信水平)。
在距地球20200公里的六個軌道上,
GPS衛星所發射的訊號型態包含:電碼觀測量(code)與載波相位觀測量(carrier phase),
其載波為L波段的無線電微波,依頻率又可分為L1(頻率1575.42MHz)、L2(頻率1227.60MHz)兩種。
將電碼觀測量與星曆訊息(衛星位置)調制於載波上,提供地面接收儀量測衛星距離,
以距離交會的概念計算相對於衛星的相對位置。L1載波上所調制的電碼觀測量為C/A電碼與P1電碼,
而L2載波上只調制P2電碼,相關GPS訊號基本資料見下表1-1。
表1-1 GPS衛星訊號基本資料表:
|
原子鐘(銫、銣)基本頻率 |
10.23MHz |
L1載波訊號
L1頻率
L1波長
L2載波訊號
L2頻率
L2波長 |
154╳10.23 MHz
1575.42 MHz
≒19.05cm
120╳10.23MHz
1227.60MHz
≒24.25cm |
C/A電碼頻率
C/A電碼波長
C/A電碼週期
P電碼頻率
P電碼波長
P電碼週期 |
1.023MHz(Mbps)
293.1m
0.001秒
10.23MHz(Mbps)
29.31m
266天 |
bps = bits per second
SPS是以單頻中的C/A電碼為基礎,PPS則是憑藉GPS雙頻訊號中P電碼部份。
在美國國防部於1994年1月31日實施AS效應(Anti-Spoofing)後,P電碼皆鎖碼成Y電碼,
一般用戶已無法獲得,唯接收儀製造廠仍能以特殊技術(例如Ashtech Z-tracking...等)
取得較高精度的電碼觀測量。
對於一般使用者的限制除了AS效應外尚有SA效應(Selective Availibility),
SPS提供的定位精度是SA效應影響後的結果,透過更改廣播星曆與衛星時錶以蓄意降低C/A電碼的精度。
此政策在1990年3月之後實施於所有的Block II衛星,雖然在1990年9月波斯灣衝突初期曾經減弱AS效應,
但在1991年7月1日後又重新啟動至最強程度,持續地影響GPS定位的一般用戶。
表1-2說明AS效應與SA效應對SPS與PPS定位精度所產生的影響。
表1-2 單接收儀在AS與SA效應下的定位精度:
|
AS |
SA |
SPS |
PPS |
|
C/A-code |
P-coda |
C/A-code |
P-coda |
|
Yes |
Yes |
100 m |
- |
40 m |
20 m |
|
Yes |
No |
40 m |
- |
40 m |
20 m |
|
No |
Yes |
100 m |
95 m |
40 m |
20 m |
|
No |
No |
40 m |
20 m |
40 m |
20 m |
載波相位觀測量
GPS衛星發射的載波訊號是時間的函數,假設衛星於T時刻發射一訊號,其相位為ψs(T),這個訊號經過大氣層傳播到接收器時為時刻t,而接收器內部的頻率振盪器自己也產生一個參考相位,在t時刻參考相位為ψr(t),當接收器把兩個相位鎖定比對之後,便可得到一個小數週波值(Fractional Cycle)之相位差ψ(t),(參考圖3-1),這就是載波相位觀測的基本觀測量,以數學式表示為:
ψ(t)= ψs(T)-ψr(t)......(3-1)
GPS載波相位觀測原理與電子測距儀的原理相似,不同的是電子測距儀的訊號經反射而回到儀器本身,所得之相位差量乃基於同一時錶基準;而GPS訊號僅單向由衛星傳送至接收儀,載波相位差是由衛星時錶與接收儀時錶兩個基準所求出,因為衛星時錶與接收儀時錶都有誤差存在,使得觀測量需以二次差分(double difference)方式消除時錶誤差,所以測量上常用相對定位方式消除系統誤差,提高定位的精度。
GPS接收儀在剛開始接收訊號時,僅量得相當於小數部份的載波相位差,載波在行進路徑中所包含的完整載波個數為未知數,若此個數已知即可計算載波傳送所經過的精密距離。
然而,每個觀測站接收器所記錄的相位觀測量中含有各種誤差,在基線測量時多採用兩個站以上同時觀測之相對定位方式進行,期望能將誤差量盡可能消除。
並非所有的誤差皆能消除,有些可以採用差分方式(Differencing)來消除,有些可以利用是數學模式作有效的消除,有些則無法預測故無法修正,只能避免其發生。
單頻載波相位觀測量之線性組合
載波相位觀測的基本方程式中包含了兩種不同類型的未知參數,
一種是我們想要的參數,例如測站座標(X、Y、Z)等。可稱之為必要參數。
另一種是我們不太感興趣的參數,例如觀測瞬間的接收器時錶誤差,觀測瞬間的電離層延遲等,
可稱之為多餘參數。
我們對多餘參數本身並不感興趣,因此就必須想辦法將之去除。解決的辦法就是透過差分的方式來消除,
也就是藉著觀測量進行線性組合來達到目的。
考慮GPS定位時的誤差來源,實際上廣為使用的方法只有三種:
在接收器求一次差、在接收器與衛星之間求二次差及在接收器、衛星及觀測時刻間求三次差。
地面一次差(Between receiver single difference)
地面一次差係指某一時刻,基線端點兩不同接收儀對同一衛星相位的觀測量相減(差分)而得,由於衛星時錶誤差對此二觀測量的效應幾乎相同,經此差分後可消去衛星時錶誤差dt,得到地面一次差的觀測量,表示為:

△:表示地面一次差之結果
空中一次差(Between satellite single difference)
類似地面一次差,我們也就某一時刻之同一接收器,同時對兩顆不同衛星觀測的相位觀測值作差分,而得空中一次差。此時接收器時錶效應在觀測量上是完全相同的,所以藉此差分可消去接收器時錶差dT,得到空中一次差的觀測量,表示為:

▽:表示空中一次差之結果
二次差(Double difference)
在某一時刻,若結合地面一次差及空中一次差觀測量之差分,即可形成二次差觀測量。因二次差內同時具有地面一次差及空中一次兩者的效果,故能消除衛星時錶差dt及接收器時錶差dT,如此得到二次差觀測量,表示為:

▽△:表示二次差之結果
三次差(Triple difference)
參考圖3-7,因為二次差中尚存有週波未定值▽△N項,若取相鄰兩時刻的二次差相減,在沒有週波脫落(Cycle Slip)發生的情況下,那麼相鄰兩個時刻的二次差觀測值中之週波未定值項應相同,故差分的結果,可消去相位未定值項,如此得到三次差觀測量,表示為:

▽△:表示三次差之結果
因此,若三次差後的結果,仍含有整數週波值,則可判定為週波脫落所致。所以,三次差觀測量遂可以作業偵測週波脫落之方法,又由於不含整數週波值一項,故可以很方便求解出基線的座標分量,作為近似值用。
雙頻載波相位觀測量之線性組合
GPS發射的兩個載波L1、L2間的線性組合雖然可以有很多種,但是有些特定的組合是有其個別的目的,
在此舉出四種特定的線性組合:
無電離層線性組合(Ionosphere Free Linear Combination)、
無幾何距線性組合(Geometry-Free Linear Combination)、
寬巷線性組合(Widelane Linear Combination)、
窄巷線性組合(Narrowlane Linear Combination)。
跟據3-2式,再以下標1、2分別表示屬於L1、L2的載波相位觀測量
(以長度公尺為單位),可得個別的載波相位觀測量:
L1: ......(3-7)
......(3-7)
L2:  ......(3-8)
......(3-8)
無電離層線性組合L3
無電離層線性組合L3主要目的是消除載波相位觀測量(3-7)、(3-8)式中的電離層效應
 項。其模式為:
項。其模式為:
L3:




電離層效應:
電離層影響量與頻率平方成反比


無幾何距線性組合L4
無幾何距線性組合L4主要目的是消除載波相位觀測量(3-7)、(3-8)式中的幾何距R及對流層效應
 項。其模式為:
項。其模式為:
L4:
 .....(3-10)
.....(3-10)
寬巷線性組合L5
寬巷線性組合L5主要目的是形成一波長較L1、L2更長並具有整數的相位未定值之組合波。其模式為:

 ......(3-11)
......(3-11)
寬巷載波之波長:
窄巷線性組合L6
窄巷線性組合L6主要目的是形成一波長較L1、L2更短並且為整數的相位未定值。其模式為:

 ......(3-12)
......(3-12)
窄巷載波之波長:
GPS誤差來源
GPS主要的系統誤差可歸納如下:
1.與衛星有關的誤差
衛星在軌道運行中受到多種攝動力的影響,因而會與數學模式估計的位置產生偏差,因此使用者由廣播星曆(衛星位置絕對精度約20公尺)所獲得的衛星位置已包括此系統誤差。雖然可以利用事後改正之精密星曆(衛星位置絕對精度約10公分),但是在即時定位應用的層面上,必須認為廣播星曆所提供的衛星軌道是不含誤差的,所忽略的誤差項對於定位的影響實際上仍然存在。
2.衛星時錶誤差
每個GPS衛星雖設有高精度的原子鐘,但仍會對應於GPS產生些微的偏移或漂移,其量值大小可透過地面主控站的連續監測而確定,再經由訊號提供給使用者。此時衛星時錶可準確至20ns之內,殘餘量可再以觀測量的差分方式消除。
3.訊號傳播的誤差:
3-1.電離層延遲誤差:
GPS訊號為一電磁波,通過距地球表面50至1000公里的電離層時會產生訊號延遲現象,其大小與電磁波頻率、電離層電子含量有關。欲降低此類誤差的影響可透過雙頻觀測、建立電離層延遲模式或以觀測量差分的方式來達成,其中觀測量差分對於單頻觀測量的重要性尤其明顯。
3-2.對流層延遲誤差:
對流層對GPS訊號延遲的影響可分為乾、濕兩部份,影響的因素包括大氣溫度、壓力、濕度與高度。可建立對流層延遲的模式加以改正,若在基線較短(例如10公里以內)的情況下亦能夠以觀測量差分的方式有效地減弱此一誤差。
3-3.多路徑效應誤差:
若測站環境不佳,則接收儀天線除了直接接收的訊號外,尚可能接收到經由其他物體所反射的GPS訊號,兩者混合會引起天線相位中心的變化,稱為多路徑效應。此誤差隨反射面的性質不同而改變,難以有效評估,僅能以天線加設金屬擋板(choke ring)或避免天線架設於易受干擾的環境等方法削弱。
GPS衛星測量方法
隨著觀測衛星數目的增加,以及相位未定值求解理論不斷的推陳出新,導致GPS定位測量方式亦不斷的演變,從最初的靜態測量(Static)發展到半動態測量(Semi-Kinematic)、虛擬動態測量(Pseudo- Kinematic)、快速靜態測量(Rapid Static)、動態測量(Kinematic),直至目前結合無線電通訊設備的即時性動態測量(Real-Time Kinematic),至此GPS定位測量方式可以說是已經發展到了另一個新的應用階段。
根據前述載波相位觀測理論及其定位精度,將GPS衛星測量方法簡單歸納並依其網形及點位之測設方式及各種測量工程之應用對象說明如下:
靜態基線測量:
適用於邊長5公里以上之高精度控制網測量。如地殼變動、大區域之大地控制網等。
快速靜態測量:
測點迅速適合於短邊長(5公里以內)控制測量、加密測量及導線測量。細部點位測量及界址點測量亦可應用。
半動態測量:
適合於空曠地區、點位密集之小規模測量。
虛擬動態快速測量:
適用對象與快速靜態測量類似。
純動態測量:
適用於移動物體之軌跡定位,道路中心線測量及水道測量等。