|
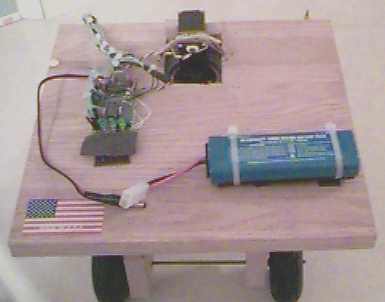
This robot was one I built to compete in an Area Coverage contest in the Nashua Robot Builders club. I built in in sort of short order, and you can see that it is quite simple.
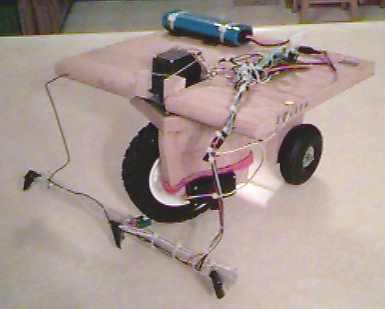
The idea for the tricycle design came when I saw a similar design on a robot on the web. It simplifies the drive (front wheel driven) and the steering via the same wheel. The only tricky part of it is to make it all come together mechanically.
In order to do that, I used a Lazy Susan ball bearing that I bought at a home store. (Home Depot maybe?)
Anyways, my plans were drawn up on a napkin, but I didnt save them in order to scan them in.
But I did do a decent job of keeping the code I wrote for it. In fact, I wrote up two versions of the code. The first was in STAMP1 language, and the second was in SIL, a sort of Basic/Pascal/Modula-1 syntaxed language.
|