ABSTRACT
Hazardous or
uncomfortable working conditions, repetitive tasks, difficult
handing, and multi-shift operations demands use of robots in
industrial situations. They are greatly applied in production
situations. Such as materials transfer, machine loading, welding,
sprays coating, process operations, assembly, and inspection.
Material transfer robot includes pick and place operations.
Computer Aided Manufacturing (CAM) systems involves the use of
industrial robots to perform a portion of the parts handing chore.
Pick and place robots are used to move work parts between the
machine and to orient and locate the work parts for processing at
the machines. This paper describes a simple low-cost pick and
place type robotic system is designed to transfer the work parts
from one place to another. Pick and place operations are
controlled through PC by using add-on card. One can pick the
object and place at a position decided by user using PC. Software
is developed for deciding angle through which the robot arm moves
pick and place positions and activation of sensor.
Introduction
- The completely automated and integrated
environment consists of computers, PLCs, NCs, CNCs or DNC
machine robots, database management system (DBMS), LAN
based instrumentation and graphical user interface (GUI)
based software.
- Robot is an integral part of the computer
aided manufacturing (CAM) systems for providing
flexibility, high productivity and improving the quality
product consisting of faster operations and hazards
situations.
Motivation
- Robots are ideally suited for any
repetitive job, which is regarded as too boaring or too
tedious for human operators.
- For such situations pick and place robot
is an ideal solution where more flexibility is not
desired. This paper describes fabrication of a simple
robot for a small production line or work-cell2.
Designing of pick and place
robot
- A robot is a re-programmable,
multifunction manipulator designed to move material, and
parts, tools or specialised devices through variable
programmed motions for the performance of a variety of
tasks2.
- Another generalised definition of robot is
that an industrial robot is a general purpose,
programmable machine possessing certain anthropomorphic
characteristics.
- Design and fabrication of a robot is
mainly divided into three major aspects namely:
Mechanical, Electronics, and Interfacing to PC
Mechanical aspects:
- The main mechanical part in pick and place
robotic system is to fabricate a robotic arm.
- Basically the robotic arm is designed for
the application such that it can hold both the solenoid
actuator and the object.
- One end of the arm is fixed which is
mechanically coupled to the shaft of the stepper motor so
that it can be moved in angular direction.
- The second end of the arm consists of
solenoid actuator mechanically coupled to the arm, which
is used to pick and place the object from one position to
the other at desired angle.
- The stepper motor with robotic arm is
mounted on a metallic base-table. The torque of the motor
is 1/2 kg. The counterweight is added to balance the
mechanical system.
Electronics aspect:
- For the controlled movement of robotic arm
at a desired position, electronic control circuit is
designed.
- It consists of stepper motor controller IC297
and dual full bridge driver IC2983.
- Stepper controller generates four phase
drive signals for stepper motor in PC controlled
application.
- The motor can be driven in half step and
full step mode. On chip PWM chopper circuit permits
switch mode control of the current in the winding. A
feature of this device is that it requires external clock,
mode input, and direction signals.
- The phase sequence is generated internally.
Hence programming burden is highly reduced for
interfacing purpose.
- IC L298 is high voltage and high current,
dual bridge driver.
- It accepts TTL logic levels at the input
and it can drive inductive load.
- The bridge is grounded through current
sense resistors.
- Current mode PWM maintains the torque at
high speed.
- Stepper motor of rating 12V/500mA is
selected for the present application.
- The controller supply is +5 V and driver
supply is +12 V. The diodes are used as a feedback diode
to return the energy to the supply in the off time of PWM.
- These fast switching diodes also protect
the driver transistors during off time.
Interfacing to PC:
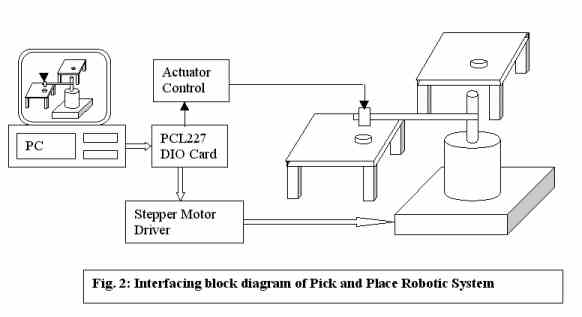
- Figure-2 shows the interfacing block
diagram of the pick and place robotic system.
- System consists of digital input output (DIO)
PC add-on card, stepper motor controller circuit and
robotic arm. DIO card, PCL227 supplied by Dynalog Systems4
is used in the present system.
- The control software ROBO is
designed developed and implemented so as to integrate,
mechanical, electronics and computer interface cards for
a simple assembly line.
- Figure-3 indicates flowchart of the
control software ROBO. The flowchart itself is
self-explanatory. After initializing the hardware, the
pick and place positions, and the actuation current of
the electromagnetic actuator are decided.
Results and Discussion
- Pick and place robot has been designed to
move the work parts from one position to another.
- The system is implemented with a proper
integration of the respective mechanical, electronics and
computer hardware and software.
- This software has been developed under
Turbo C/C++ environment.
- It is completely tested for consistency
and reliability for the precise movement of the arm.
- The pick and place positions can be
precisely selected with minimum angle of rotation of ± 0.90.
- It has been observed that by changing the
activation current of the electromagnetic actuator, the
amount of weight that could be picked up also varies
linearly.
- By setting the actuation current,
different objects having different weights could be
sorted out.
- Selection of specific object from a lot of
objects can also be implemented. This work in this
direction is in progress.
References:
- B. Hodges, "Industrial Robots",
Jaico publishing house (1993).
- Groover, Mikell P.Groover, Zimmers, JR.
"CAD/CAM : Computer-Aided Design and Manufacturing
",Printice Hall of India Private Ltd.( 1992).
- SGS-THOMSON MICROELECTRONICS "Industrial
and Computer Pheripheral Ics " DATA BOOK, (Oct. 1988).
- Installation and Operating Manual of PCL-227
DYNALOG MICRO SYSTEMS PVT.LTD. (1996).